Jõudude vektoriaalne liitmine. Resultantjõud
Kui keha on samaaegselt vastastikmõjus mitme kehaga, siis võrdub tema liikumise kiirendus nende kehade poolt põhjustatud kiirenduste, millega keha liiguks teiste kehade mõjude puudumisel, vektorsummaga – seega kui kehale mõjub samaaegselt mitu jõudu, tuleb need jõud liita omavahel nagu vektorid.
Sulle võivad huvi pakkuda need õppematerjalid:
Harjutamine teeb meistriks: eesti keele käänded
Liitmine 20 piires
Tundetarkus lastele. ÜLLATUS
Oksüdatsiooniaste
Õpime tähti. X- ja Y-täht
Õpi eesti keelt teise keelena B2. Lugemine
Õpime tähti. Ü-täht
Õpi eesti keelt teise keelena B2. Kuulamine
Aigar Vaigu ja Andres Juur. Õpioskuste omandamine ning reaal- ja loodusained
Harjuta eesti keelt A2-B1. Lugemine
Õpi eesti keelt teise keelena B2. Grammatika
Õpime värve!
Funktsioonide graafikud
Õpime tähti. R-täht
Õpime tähti. W- ja C-täht
Eesti keele grammatika kordamine 6. klassile
Kehale mõjuvate jõudude vektorsummat nimetatakse nende jõudude resultandiks ehk resultantjõuks.
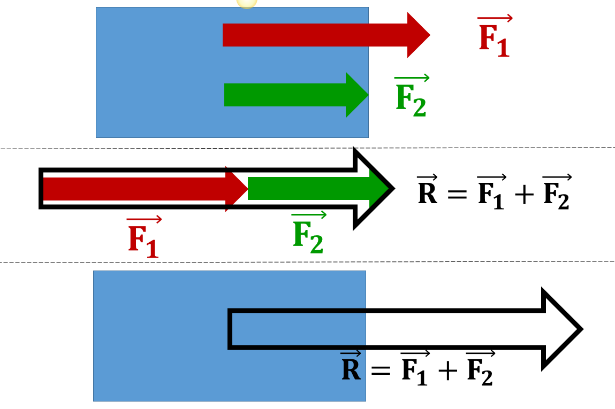
Kui kehale mõjuvad jõud on samasuunalised, siis nende mõjud liituvad – resultantjõu moodul on võrdne komponentide moodulite summaga.
![]()
Kuna liidetavad vektorid on samasuunalised, siis on loomulikult ka resultantjõu suund sama.
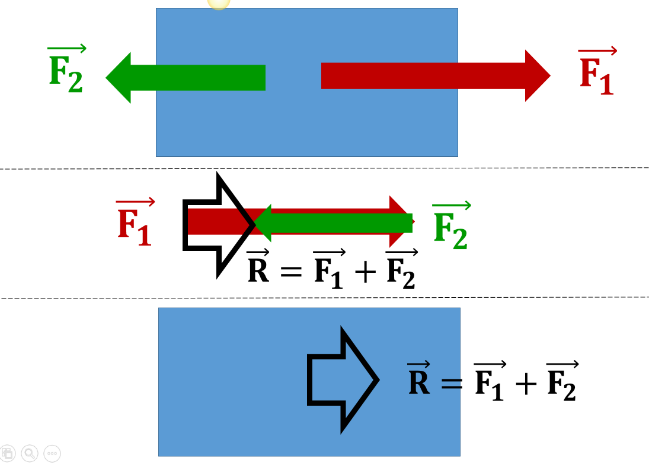
Kui kehale mõjuvad jõud on vastassuunalised, siis nende mõjud nõrgendavad teineteist – resultantjõu moodul on võrdne komponentide moodulite vahega.
![]()
Kui resultantjõu mooduli väärtus on negatiivne, tuleb seda tõlgendada kui asjaolu, et resultantjõu suund langeb kokku teise liidetava suunaga ![]() , kui positiivne, on resultantjõu suund sama kui esimesel liidetaval
, kui positiivne, on resultantjõu suund sama kui esimesel liidetaval ![]() .
.
Kui kehale mõjuvad jõud on teineteisega risti, saab resultantjõu mooduli leidmiseks kasutada Phytagorase seadust:
![]()
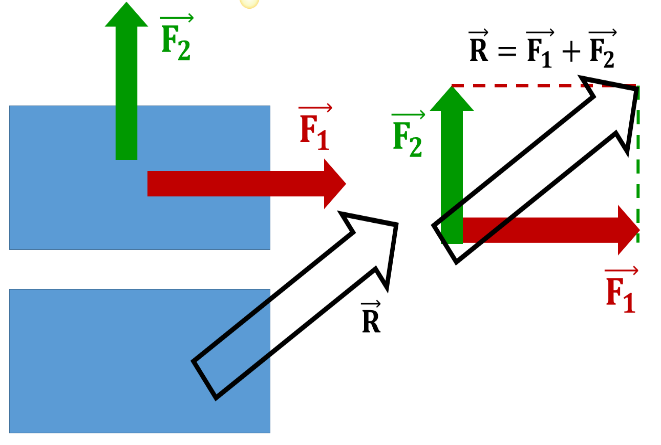
Risti asetsevate jõudude resultantjõu suuna saame määrata tangensi (vastaskaatet jagatud lähiskaatetiga) pöördfunktsiooni abil.
![]()
kus α on nurk resultantvektori ning esimese liidetava vahel ![]() .
.
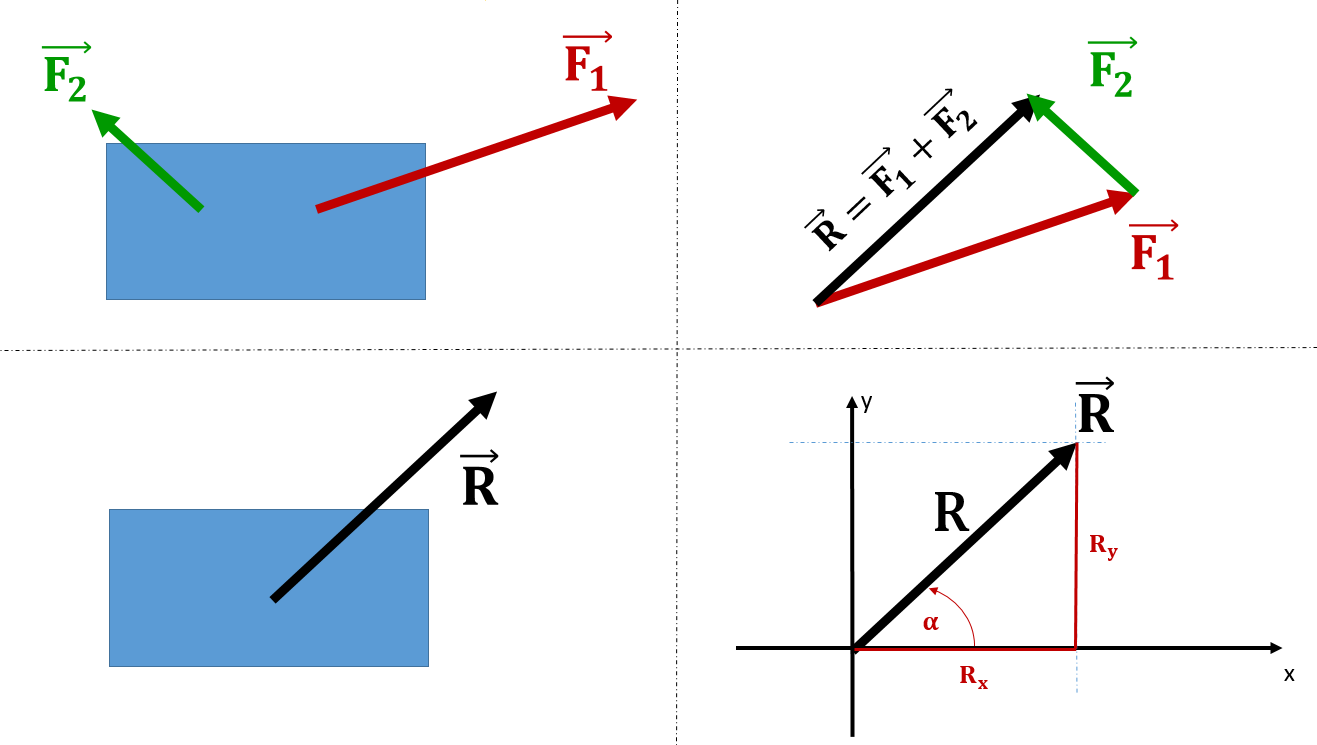
Kui liituvad jõud asuvad suvalise nurga all, tuleb nende liitmiseks lahutada jõud komponentideks ning liita omavahel vastavad komponendid:
ning need omakorda avalduvad jõudude moodulite ning x-telje positiivse suuna vaheliste nurkade kaudu
F1x=F1cosα1 F1y=F1sinα1 F2x=F2cosα2 F2y=F2sinα2
Kui
![]()
ning
![]()
ja
Rx=F1x+ F2x=F1cosα1+ F2cosα2
Ry=F1y+ F2y=F1sinα1+ F2sinα2
Resultantjõu suuna leiame jälle tangensi pöördfunktsioonina:
![]()
ning α on nurk resultantvektori ning x-telje positiivse suuna vahel.
NB! Kalkulaatoriga arvutamisel tuleb jälgida asjaolu, et kui kalkulaator väljastab tangensi pöördfunktsiooni väärtuseks x° siis α leidmiseks
1) kui Ry>0 ja Rx>0 => siis 0° <α< 90° ehk α = x;
2) kui Ry>0 ja Rx<0 => siis 90° <α< 180° ehk α = 180°+x;
3) kui Ry<0 ja Rx<0 => siis 180° <α< 270° ehk α = 180°+x;
4) kui Ry<0 ja Rx>0 => siis 270° <α< 360°ehk α = 360°+x
Märkasid viga? Anna sellest teada ja teeme TaskuTarga koos paremaks!
